Generalized Image Acquisition and Analysis










Sensor Saturation in Fourier Multiplexed Imaging
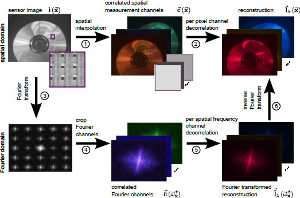
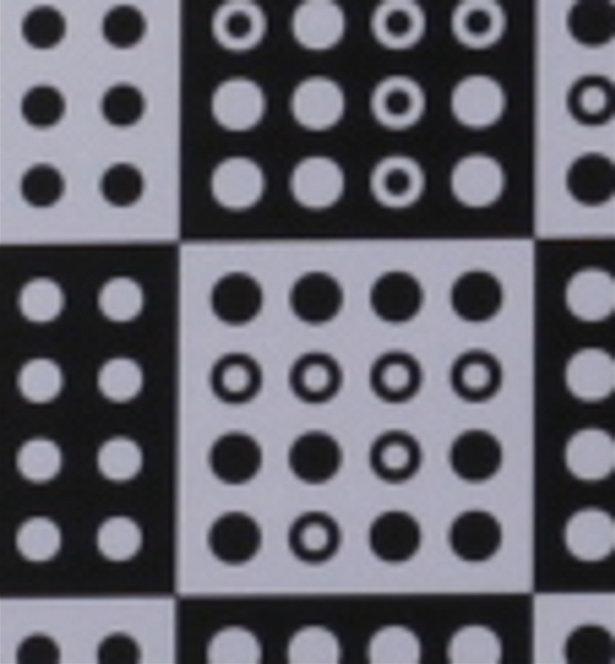
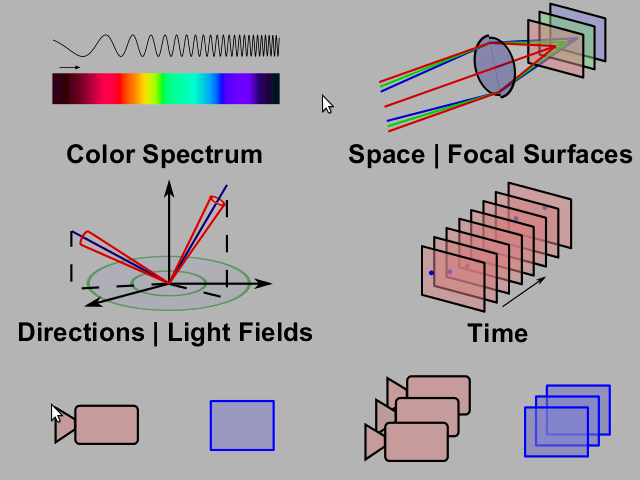
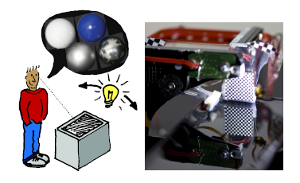
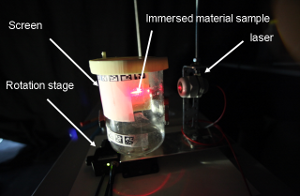
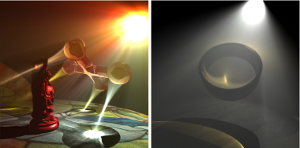
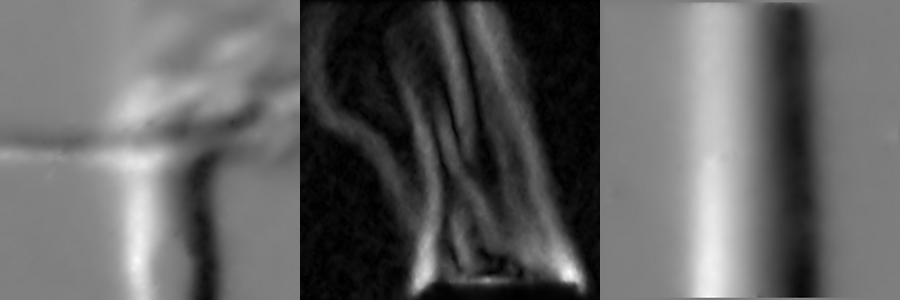
Optically multiplexed image acquisition techniques have become increasingly popular for encoding different exposures, color channels, light-fields, and other properties of light onto two-dimensional image sensors. Recently, Fourier-based multiplexing and reconstruction approaches have been introduced in order to achieve a superior light transmission of the employed modulators and better signal-to-noise characteristics of the reconstructed data.
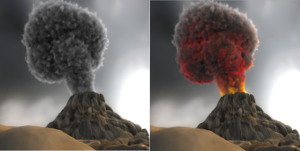
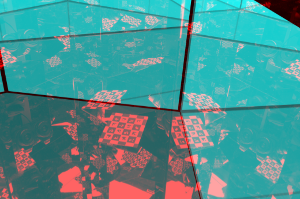
We show in this paper that Fourier-based reconstruction approaches suffer from severe artifacts in the case of sensor saturation, i.e. when the dynamic range of the scene exceeds the capabilities of the image sensor. We analyze the problem, and propose a novel combined optical light modulation and computational reconstruction method that not only suppresses such artifacts, but also allows us to recover a wider dynamic range than existing image-space multiplexing approaches.
Projects
Intrinsic Shape Matching by Planned Landmark Sampling
In: Proceedings of EUROGRAPHICS 2011.
Abstract
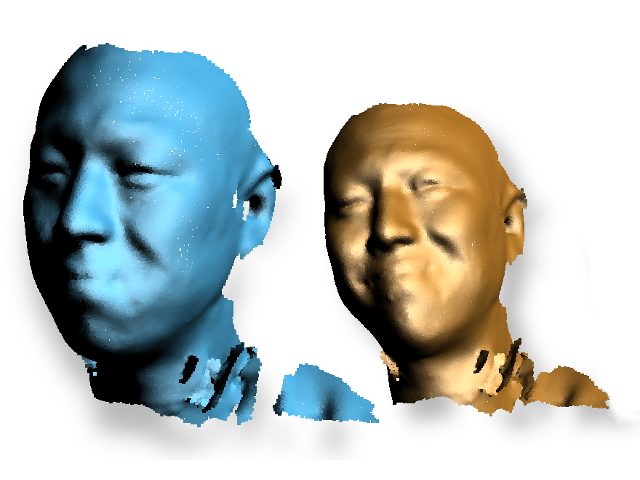
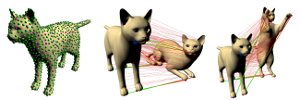
Recently, the problem of intrinsic shape matching has received a lot of attention. A number of algorithms have been proposed, among which random-sampling-based techniques have been particularly successful due to their generality and efficiency. We introduce a new sampling-based shape matching algorithm that uses a planning step to find optimized "landmark" points. These points are matched first in order to maximize the information gained and thus minimize the sampling costs. Our approach makes three main contributions: First, the new technique leads to a significant improvement in performance, which we demonstrate on a number of benchmark scenarios. Second, our technique does not require any keypoint detection. This is often a significant limitation for models that do not show sufficient surface features. Third, we examine the actual numerical degrees of freedom of the matching problem for a given piece of geometry. In contrast to previous results, our estimates take into account unprecise geodesics and potentially numerically unfavorable geometry of general topology, giving a more realistic complexity estimate.
Project Page Bibtex
@INPROCEEDINGS{Tevs11:plansac,
AUTHOR = {Art Tevs and Alexander Berner and Michael Wand and Ivo Ihrke and Hans-Peter Seidel},
EDITOR = {Deussen, Oliver and Chen, Min},
TITLE = {{Intrinsic Shape Matching by Planned Landmark Sampling}},
BOOKTITLE = {Computer Graphics Forum (Proc. EUROGRAPHICS)},
ORGANIZATION = {Eurographics},
PADDRESS = {Oxford, UK},
ADDRESS = {Llandudno, UK},
PUBLISHER = {Blackwell},
YEAR = {2011},
PAGES = {543--552},
}
AUTHOR = {Art Tevs and Alexander Berner and Michael Wand and Ivo Ihrke and Hans-Peter Seidel},
EDITOR = {Deussen, Oliver and Chen, Min},
TITLE = {{Intrinsic Shape Matching by Planned Landmark Sampling}},
BOOKTITLE = {Computer Graphics Forum (Proc. EUROGRAPHICS)},
ORGANIZATION = {Eurographics},
PADDRESS = {Oxford, UK},
ADDRESS = {Llandudno, UK},
PUBLISHER = {Blackwell},
YEAR = {2011},
PAGES = {543--552},
}